システム機材
インターフェロメトリ音響測深機C3D-LPM
3次元サイドスキャンソナー

*弊社で導入しているのはOver-the-Side Mountタイプによる舷側固定のものです。
日本国内初:世界民間初導入
C3D(シースリーディー)は米国BENTHOS社が開発した超音波により水深200mまでの海底の起伏を計測することができる3次元サイドスキャンソナーです。
Computed Angle-of-Arrival Transient Imagin(CAATI:キャティ)と呼ばれる最新のアルゴリズムにより、サイドスキャン画像と同時にマルチビーム音響測深機と同様な精度の高い測深データを取得することができます。
AGSが開発した「C3Dによる極浅水域での3次元測深技術システム」はNETISに登録されています。
C3Dの用途
【1】水深200mまでの中深海用として測深及び地形・構造物把握
【2】水深20m以浅、特に水深5m以下の測深・地形・底質(地質)・構造物把握
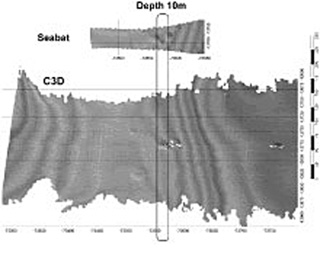
AGSは日本におけるC3D活用のパイオニアとして、より合理的かつ精度の高いデータ取得および解析技術の研究に力を入れており、特にC3Dは観測幅が従来のマルチビーム音響測深機に比べ広いことから、これまでは困難であった水深5m未満の極浅水域での活用に極めて有効です。

C3Dの特徴
● 音波を横方向(水平方向から下向きに30°)に発射
● 計測幅を広く取れる(水深の約5~10倍程度)
● IHO-S44_4thEDITION SPECIAL ORDERに適合
● 現場作業時間の軽減が可能(コストの低減)
● 測量船の進入が困難な場所も計測可能(観測範囲の拡大)
● 水深が浅い場所も計測が可能(極浅水域計測用に特化)
これまで測深できなかった箇所も計測が可能
● 岸線際の計測が可能
● 構造物の計測も可能(岸壁・護岸など)
基本性能
周波数 : 200KHz
レンジ(ビーム):25〜300m片側
計測レンジ : 水深の5〜8倍
解像度サイドスキャンソナー 4.5cm
測深分解能 : 5.5cm(レンジに依存)
測深点数 : 最大2000
ビーム幅 :1度(前後方向)
パルス長 : 25usec〜1msec
発信間隔 : 30pings/sec
トランスデューサー取り付け角 20、30、40度
発信強度 Max,244 dB re:1μPa@1M
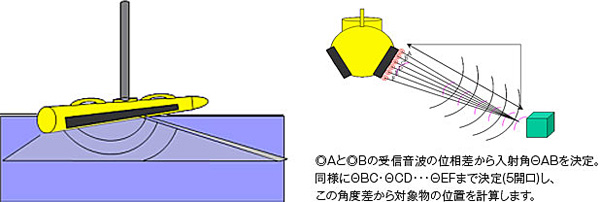
測深原理
C3Dは1個の音波発振部と6個の音波受信部を持っています。(両側で12個)
発信波は1個のトランスデューサーから1波を発信し、受信時に入射角を細かく判定することで、最大2,000点の測深点を決定することが出来ます。(CAATI方式)。
またこの音波は、同時に取得できるサイドスキャン画像にも使用されています。
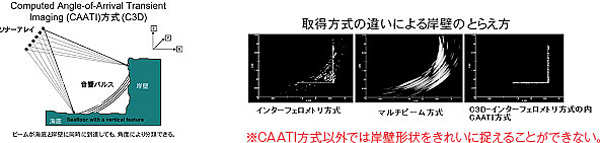
C3Dの方式
【Computed Angle-of-Arrival Transient Imaging(CAATI:キャティ)方式】
CAATIのアルゴリズムは伝播距離と到達角度の両方を計算するもので、伝播距離は計算するが角度はソナーの形状により規定されるという、従来のマルチビーム音響測深機で用いられているビーム合成法とは著しく相違しています。これは、下図に示すようにCATTI方式は同時に伝播されたビームでも角度を計算することで、どの位置であるかを判断することができるということです。
CAATIは1点からの複数の散乱波から最大5個までの同時到達角度を識別可能にしています。
C3Dは、CAATI方式を採用することで、鋭角的で垂直的な起伏を伴う難解な海底地形に、ことさら有効であるといえます。
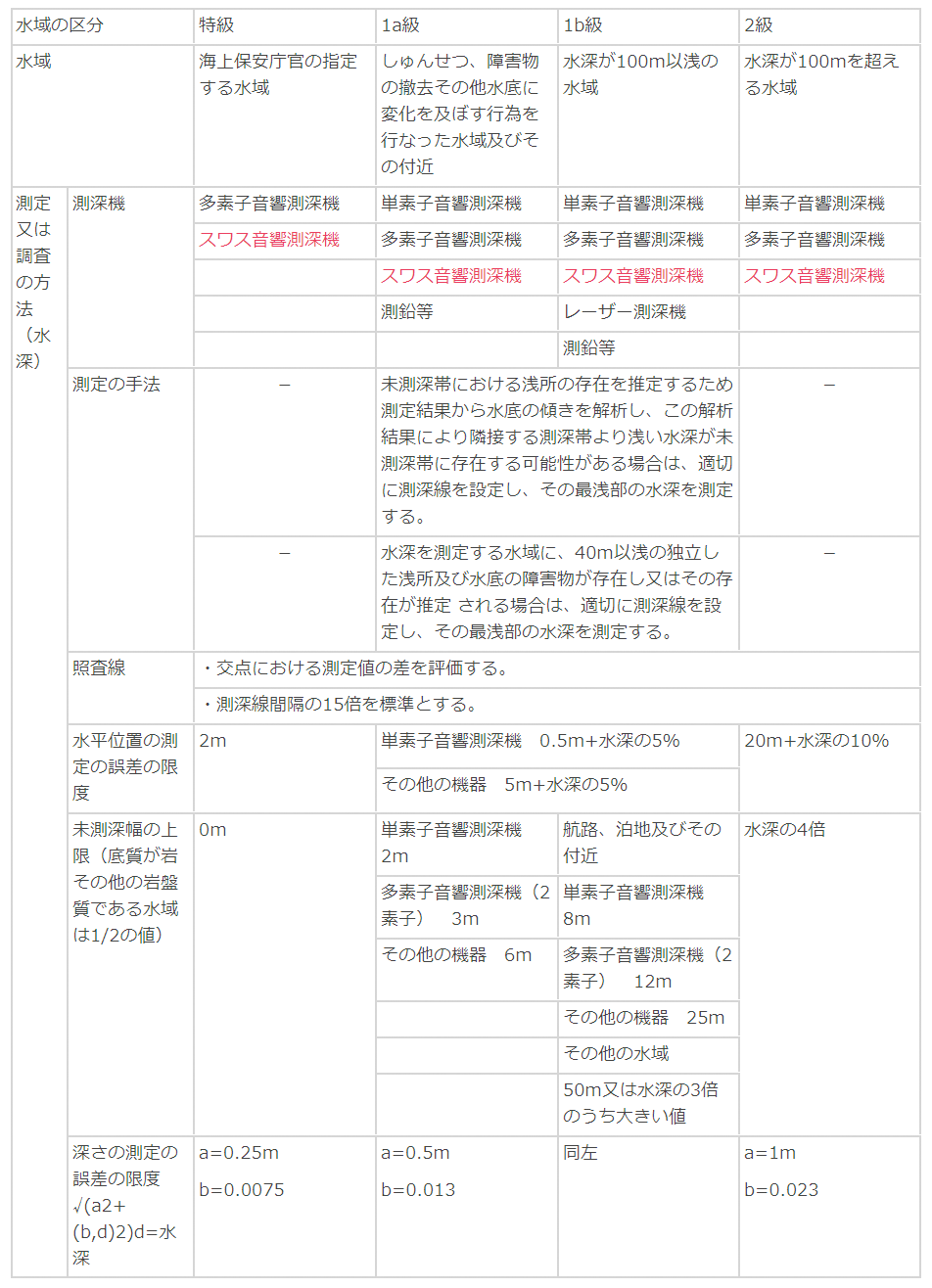
水路測量における測定又は調査の方法に関する告示
(平成14年4月1日海上保安庁告示第102号別表第二)に適合
・インターフェロメトリ(位相差式)音響測深機(4受信素子以上に限る)を使用可能とする
・スワス音響測深機とは、従来のマルチビーム音響測深機及びインターフェロメトリ音響測深機の総称
※スワス音響測深機として認定
主な改正内容(平成21年4月1日施行)
※赤字が改正後に変更された部分