技術研究・開発・特許
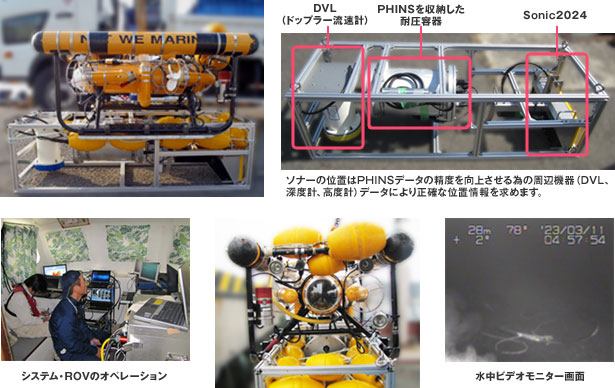
遠隔操作無人探査機(ROV)による水底部微地形計測システム
システム概要
水底部における地形計測方法は、音響測深機ソナーを船体艤装して行う方法が一般的ですが、音響による計測であるため、水深が深くなるにつれて分解能が劣化し、計測精度が落ちるという欠点がありました。そこで、音響測深機ソナーとその他計測機器類をシステム化したものを遠隔操作無人探査機(ROV)に搭載し潜航させる事により、水深に関わらず一定の高度(海底からの高さ)における音響データを取得する事を目的として開発したのが『遠隔操作無人探査機(ROV)による水底部微地形計測システム』です。
本技術の開発により、水深約200mまで高精度・高密度に計測・探査(調査)する事が可能になりました。またROVに搭載された水中ビデオカメラを活用する事により、ソナーを船体艤装して実施する従来の深浅測量では見過ごされて計測する事が出来なかった障害物や張り出した岩の下、水中洞窟等の複雑な水底地形においてもROVの機動性を生かして計測する事が出来ます。
システムの原理
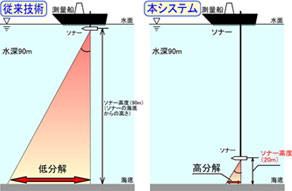
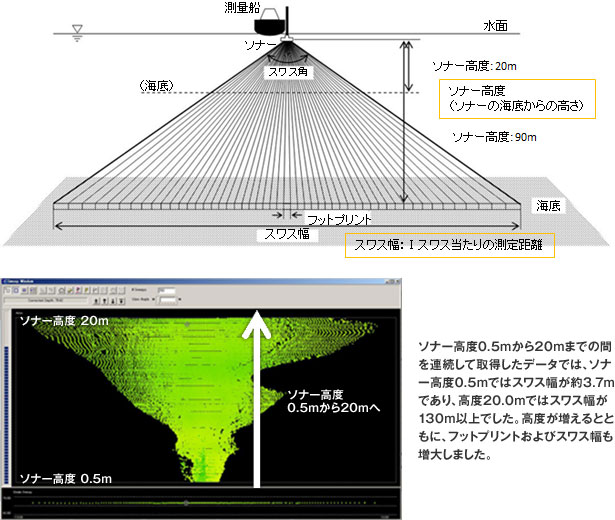
マルチビーム音響測深機ソナーを含む計測機器類を搭載したROVを高度(海底からの高さ)20mまで潜航させて水底部における微地形を計測します。従来の船体艤装ではソナー位置が水面直下にあり、水深が深くなるほど分解能が劣化するとともに、測量船の方位・動揺による誤差が計測精度に非常に大きな影響を与えていました。
しかし、本技術ではソナーをROVに搭載し、ソナーを水底部に近づけることで分解能を高めました。さらにROVを操縦することにより方位・動揺による誤差を最小限にとどめ、ソナーの位置精度を高めることで計測精度の向上をはかりました。
適用範囲
水中及び水底部の構造物計測
・水中及び水底部における構造物の設置状況(設置位置、傾き等)
施工管理及び出来高管理が必要な工事
・港湾、漁港、海岸、沿岸等の構造物施設工事
・河川、湖沼、ダムの構造物施設工事
・港湾、漁港における泊地・航路等の浚渫工事
・河川、湖沼、ダムの浚渫工事
その他
・障害物や張り出した岩の下
・水中洞窟等