技術研究・開発・特許
河川・湖沼点検ロボットシステム (みずすまし)
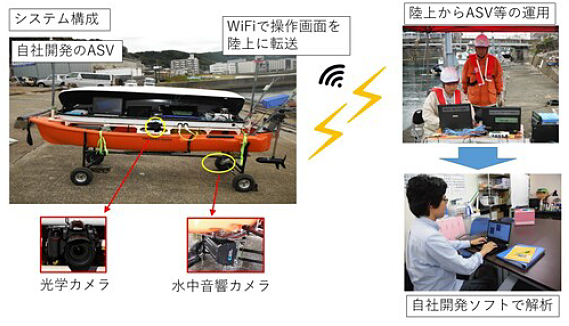
音響ビデオカメラ(ARIS)等を搭載した自律航行型水上探査船(ASV)による河川・湖沼の底面および河川の人工構造物を点検するシステム
システムの特長
・自律航行型水上探査船(ASV)に搭載したGNSSにより得られる位置情報を使用することにより、事前に設定した測線上を自律航行することができる。
・音響ビデオカメラ(ARIS)による取得データは、自律航行型水上探査船(ASV)に搭載するデータ収録PCに保管するとともに、無線LANを用いて収録画面を陸上局に転送し、陸上から音響ビデオカメラ(ARIS)の発振出力や計測レンジ等を遠隔操作しながら対象物の状況を確認できる。
・自律航行型水上探査船(ASV)に搭載した光学カメラによる水上部の画像と音響ビデオカメラ(ARIS)による水中部の画像と合成し、水陸一体の状況確認をすることができる。
・独自で開発した部分は自律航行型水上探査船(ASV)本体、システムの構成、データ合成ソフトである。
新規性及び期待される効果
① どこに新規性があるのか?(従来技術と⽐較して何を改善したのか?)
・⽔中部の点検作業を潜⽔⼠による⽬視点検から、⾃律航⾏型⽔上探査船(ASV)による点検に変えた。
・⽔中部のデータ取得⽅法を潜⽔⼠による⽬視点検から、⾳響ビデオカメラ(ARIS)によるデータ取得に変えた。
② 期待される効果は?(新技術活⽤のメリットは?)
・⾃律航⾏型⽔上探査船(ASV)による点検に変えたことにより、潜⽔作業をなくすことができ、安全性の向上が図れる。
・⾳響ビデオカメラ(ARIS)によるデータ取得に変えたことにより、⼀⽇当りのデータ取得範囲が広くなり、調査効率が向上するため、経済性の向上および⼯程の短縮が図れる。
③ 補⾜
・⾃律航⾏型⽔上探査船(ASV)は⽔上部のデータ取得⽤には光学カメラを、⽔中部のデータ取得⽤には⾳響ビデオカメラ(ARIS)を搭載している。2つの機材で取得したデータにより構造物全体の状況について把握、確認、点検ができる。

適用条件
① 自然条件
・風速:10m/sec以下
・波高:1.0m以下
・視界:1,000m以上
・流速:2.0knot以下
② 現場条件
・陸上局およびASV組み立てスペースとして、5.0m×5.0mの作業場所が必要。
・機材運搬車両用駐車スペースとして、2.5m×5.0mの駐車場所が必要。
③ 技術提供可能地域
・技術提供地域については制限なし
④ 関係法令等
・特になし
適用範囲
① 適用可能な範囲
・河床・湖底を対象とした場合は、水深0.5m以上5.0m未満。
・護岸を対象とした場合は、水深1.5m未満。
② 特に効果の高い適用範囲
・水中部において、濁水中や光源が必要な箇所でのデータ取得。
③ 適用できない範囲
・河床・湖底を対象とした場合は、水深0.5m未満および5.0m以上。
・護岸を対象とした場合は、水深1.5m以上。
④ 適用にあたり、関係する基準およびその引用元
・特になし
留意事項
① 設計時
・データ取得対象が、貝類に覆われていたり、藻類が繁茂していないか確認すること。
・撮影距離や画角を考慮した航行計画を立案するため、当社に問い合わせること。
・ASVを進水させる場所を確保すること。
② 施工時
・ASVにはガタ付きやズレがないようにセンサー類を取り付けること。
③ 維持管理等
・作業終了後は、十分に水洗いをし乾燥させること。
・作業終了後は、使用したバッテリーを取り外し充電すること。